Projects
Thermoelectric Energy Harvesting
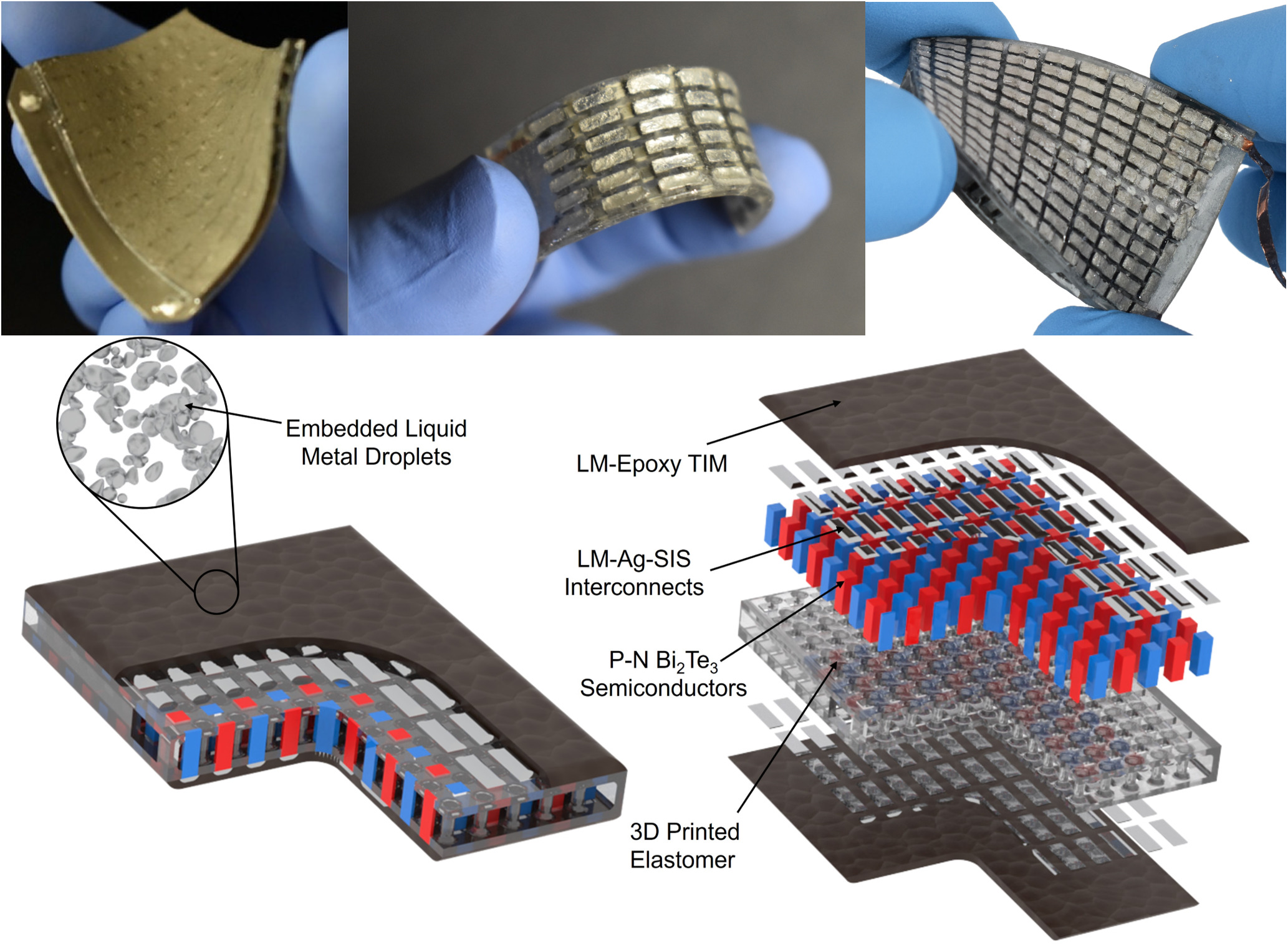
To increase operational lifetimes of wearable electronics, new energy harvesting solutions are needed. These projects focus on developing bendable and stretchable wearable thermoelectric generators to converter temperature differentials from the body into voltage. The first PPG sensor powered by body heat is demonstrated.
Soft Robotic Actuation and Harvesting
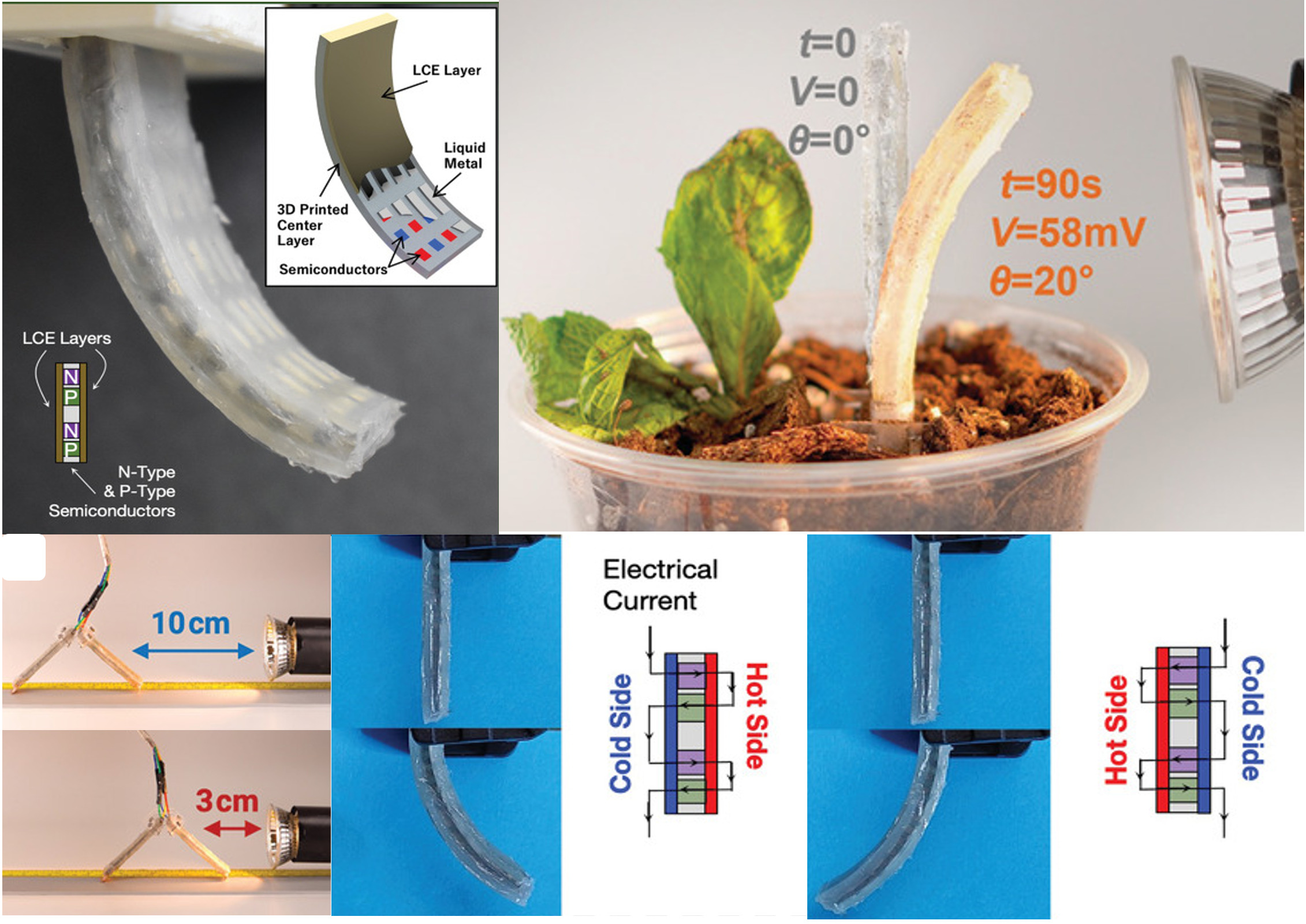
Thermally actuated soft robotic muscles lack cooling methods for precise closed-loop control. To address this shortcoming, this project focused on developing stretchable and bendable Peltier coolers for duel thermoelectric heating and cooling of liquid crystal elastomer actuators. These actuators enable single input multi-directional actuation and double as energy harvesters recycling energy from their environment.
Wireless Soft Robots & Smart Matter
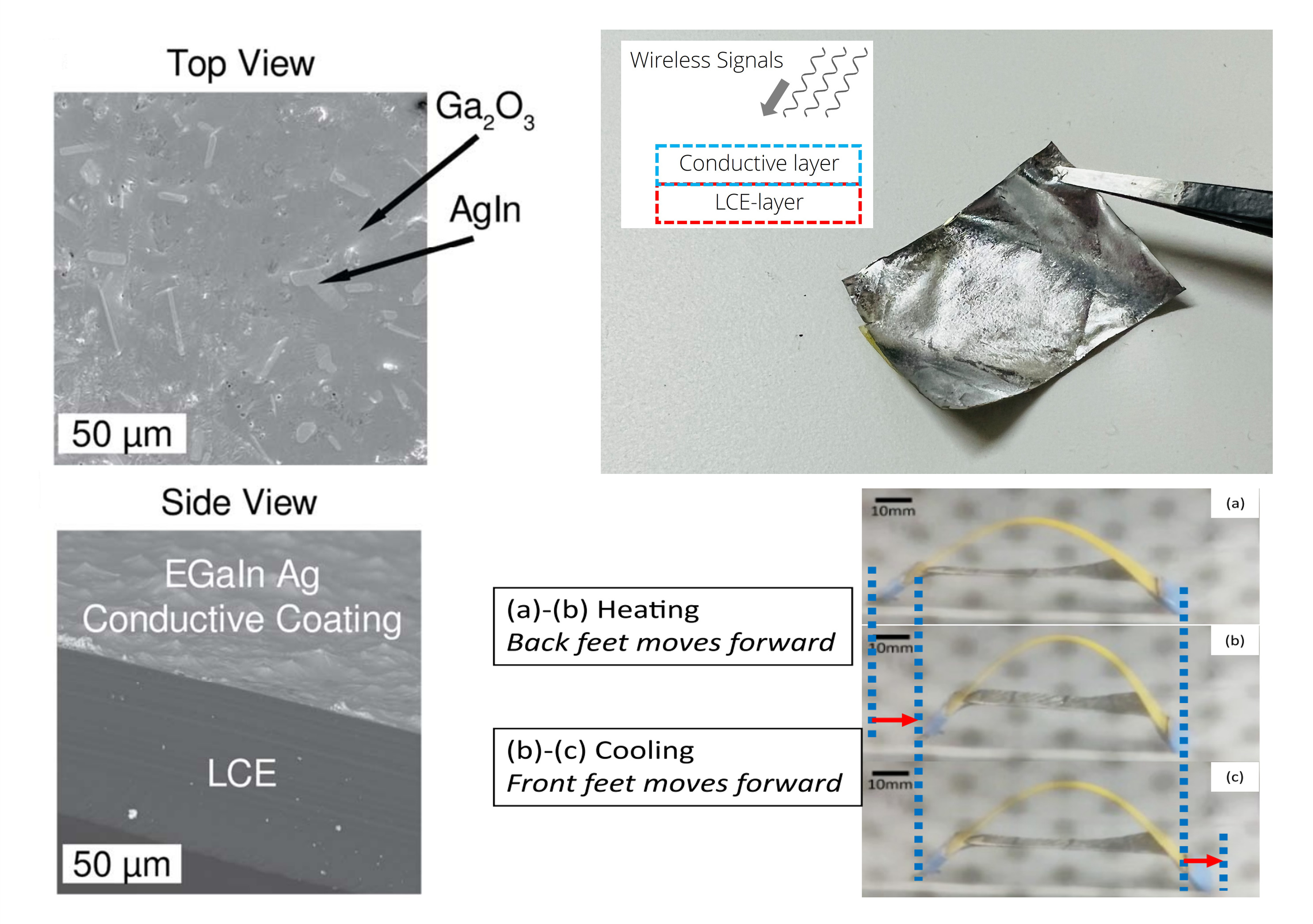
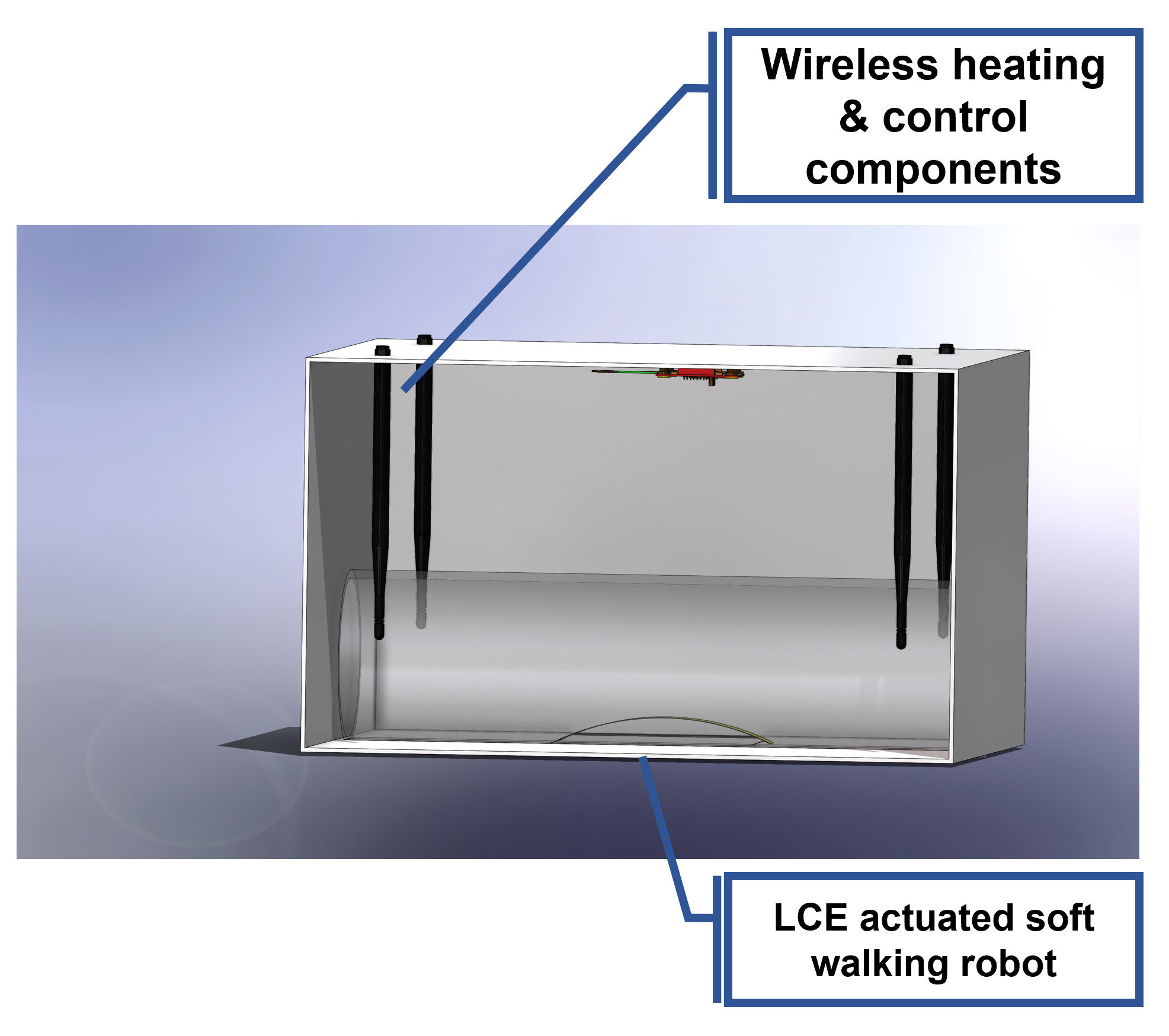
Current wireless robots require batteries for energy storage, limiting operational lifetime and increasing weight. To address this, these projects focused on developing liquid crystal elastomer based soft robots with liquid metal composite patch antennas to absorb wirelessly beamformed energy. This method enables a novel robotics platform for battery free soft robots.
Liquid Metal Composites
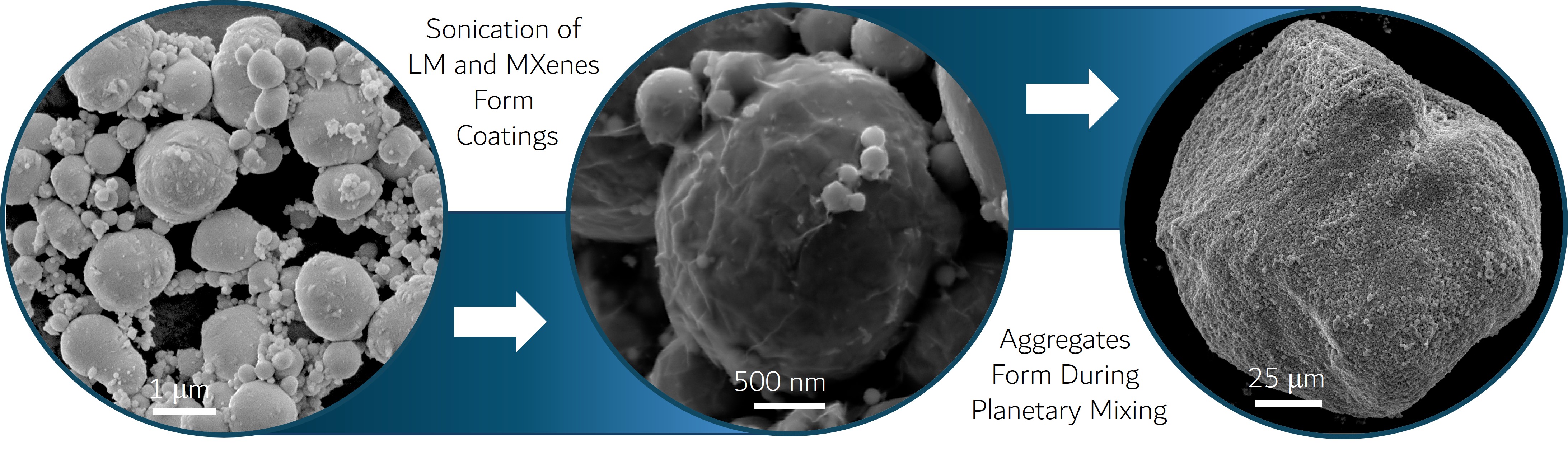
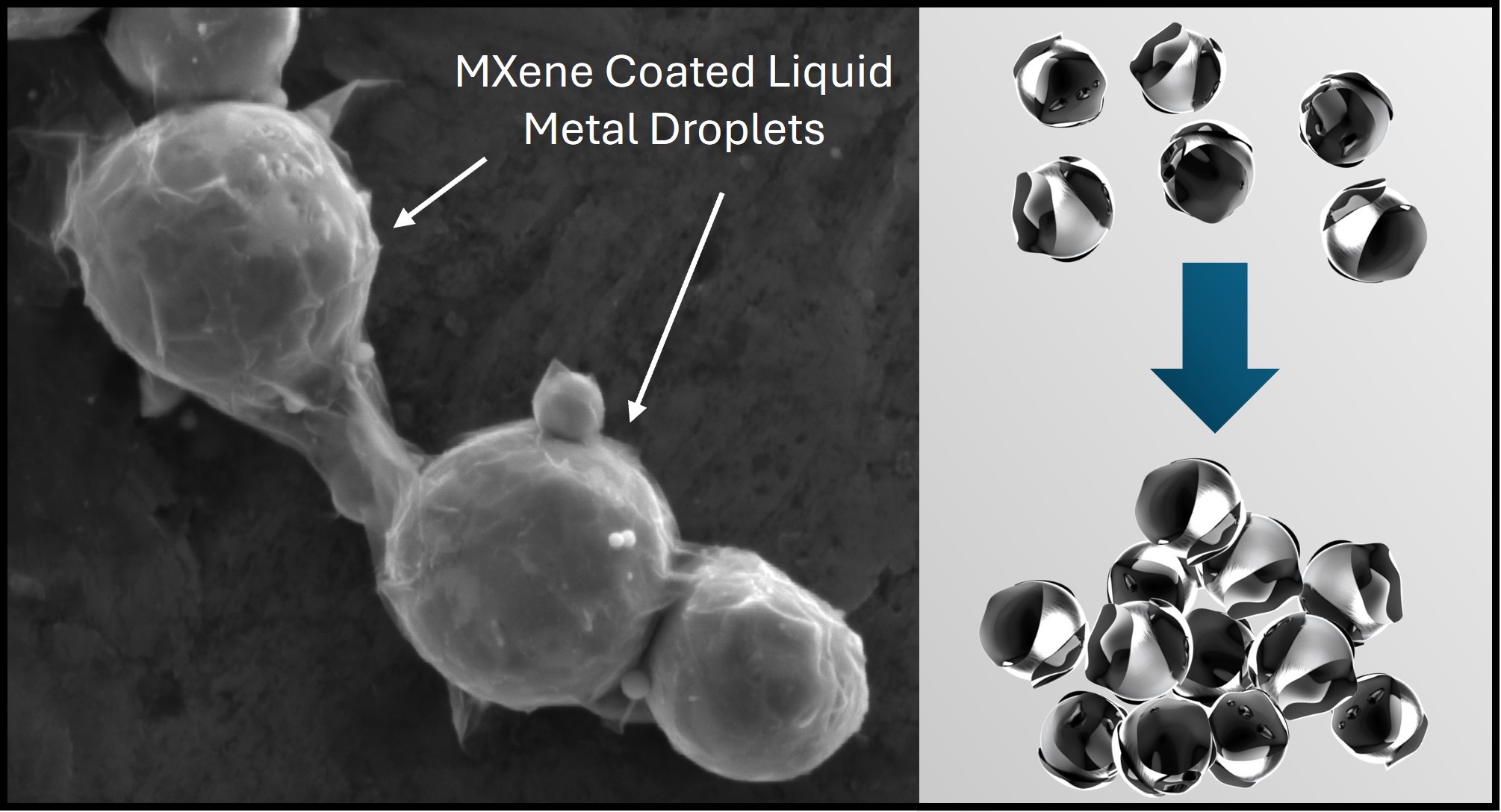
Thermal interface materials (TIM), such as thermal pastes, are placed between processors and heat sinks to improve cooling and prolong device operation. To improve TIM performance, liquid metal (LM) has been introduced into TIMs. This research aims to develop a method to wrap 2D Ti3C2Tx MXenes around LM nano-droplets to functionalize the LM surface. This “sticky” surface enables the liquid metal droplets embedded in a silicone matrix to aggregate into emergent large clusters, improving thermal and electrical performance.